粗枝大葉(yè)篇
事先(xiān)申明:我的選型方法屬(shǔ)於簡單實用,但不精準。精(jīng)準需要具體問題具體分(fèn)析,經過計算才(cái)能給出結果。
電機粗(cū)淺地分為兩大類(lèi),動(dòng)力電機和控製電機。
動力(lì)電(diàn)機,以動力轉換為目的,例如普通的交流異步電機,把(bǎ)電能轉換為(wéi)機械能,一般采用(yòng)簡單的(de)電氣電路就可以控製啟動(dòng)和停止。
控製電機,除了承擔(dān)能量和動力轉換外,更(gèng)重要的是準確地控製速度(dù)和精度,它必須配套使用驅動器或者放大器,通過控製信號(脈衝、模擬量電(diàn)壓、總線數據(jù))進行控製和調節,例如步進電機和伺服電機。控製電機是(shì)自(zì)動(dòng)化控製的核心元件(jiàn),尤其伺服電機和步進電機是3C行業廣泛大(dà)量使用的產品,如果不聊伺服電機(jī),同行工程師之間都不好意思打招呼。
控製電機選型分(fèn)為(wéi)三步,功率、速度、精度。
1. 功率/力矩(jǔ)(二者相(xiàng)通)
首(shǒu)先必須保證電機帶得動負載,如果帶不動,一(yī)切都為零。電機功率與電機的尺寸大小是正比關係——胖子力大,看(kàn)日本相撲運動員即知。大功率電機必然對應大尺寸和大體積。如果(guǒ)電機體積小,功率指標卻很大,則一定有某些使用方(fāng)麵的限製,例如溫升(shēng)。
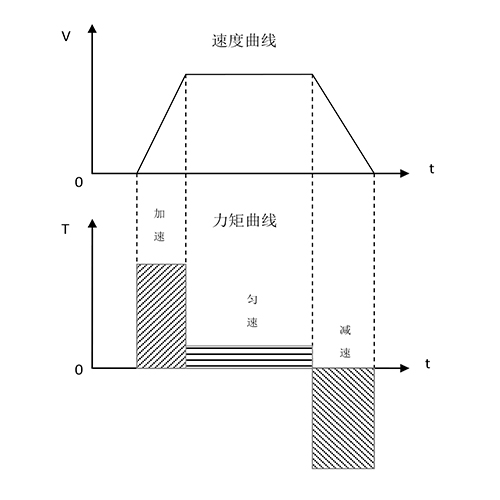
功率(lǜ)必(bì)須保證有一定餘量(liàng),既要滿足勻速運行階段(duàn)也要滿足加減速階段。加減速階段要比勻速階(jiē)段的(de)力矩大幾倍,以保證提供足(zú)夠的力矩產生加速度。勻速運行時,盡管電機的速度可以很高,但(dàn)是由(yóu)於隻需要維持(chí)勻速運動,所需力矩往往非常小。
誤區:認(rèn)為電機加速和減速所需要的時間相(xiàng)等。真(zhēn)實情況是減速耗時總是(shì)比(bǐ)加速耗時長,原因很好理解,運動的能量隻能由驅動(dòng)器完(wán)全消耗完,電機才(cái)能徹底停下來。
直線運動場合:功率=力(lì)×速度(單位:W=N×m/s)
旋轉運動場合(hé):功率(lǜ)=力矩×轉速÷10(單(dān)位:W=N.m×rpm)
產品樣機階段務必多預留一些功率的(de)餘量。功(gōng)率小了,設計時電機安裝尺寸就小,如果需要更(gèng)換大功率電機時,由於安裝空(kōng)間不夠,導致(zhì)無法安裝,有時候機械的強度也不夠(gòu)。從成本角度看,選大功率電機額外增加的成本總是比較小的。
2. 速度(dù)
速度分為(wéi)工藝速度和電機(jī)速(sù)度,兩者之間有一一對應關係,且匹(pǐ)配必須合適。
工藝速度往往是如下表述:每分鍾多少(shǎo)米放料(liào)速度;8秒鍾一個生(shēng)產周期;1小時生(shēng)產36000瓶啤酒等等。
電(diàn)機速度分為靜態精度和動(dòng)態精度(後續再詳講)
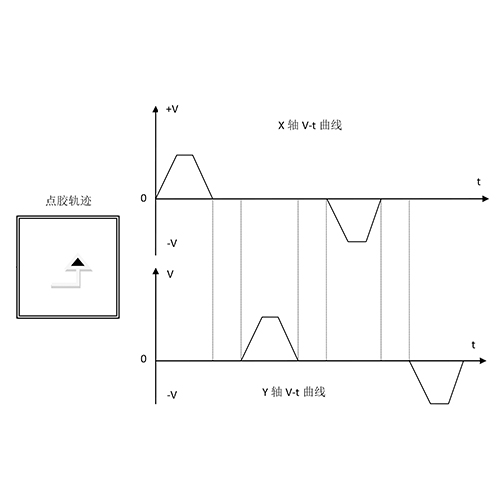
以點膠機為例,完成正方形的點膠,它的邊長100mm,機械結構X-Y平台,電機+絲杆,絲杆螺距20mm。工藝速度是要求4秒鍾完成點膠。
4段邊(biān)長,每(měi)段(duàn)邊長之間需要0.1s的暫(zàn)停時間,則實際用於點膠的時間:4-0.1×4=3.6s;每段邊用於點膠的時間(jiān):3.6÷4=0.9s
點膠平均線速度:0.1÷0.9=0.11m/s
電機轉速:0.11÷0.02=5.5rps=333rpm
關於速度,由於國情(qíng)和客戶(hù)的瘋狂追求,肯定要求(qiú)最快,甚至要(yào)求天馬行空的速度。針對此,一定要先了解行(háng)業已有的(de)速(sù)度,以這(zhè)個速度為基準,凡是超出這個基準很多的指標就不具有可行(háng)性,屬於(yú)一廂情願的自以為是。因為行業現行速度總是由工藝、材料、整個設(shè)備的(de)機械設計共同決定了,強行提高(gāo)某一個技術(shù)指標(biāo),往(wǎng)往其它方麵就會拖後腿。例(lì)如速度提高了,整個設備運行時產生(shēng)巨大的震動和噪音,設備運行的壽命也縮短了。
舉例(lì)說明行業已有的(de)速度:印刷(shuā)速度範圍是(shì)60~100m/min,機床空(kōng)回速度1m/s,3C行業加工速度是以秒作為計時基準。
3. 精度
精度分為工藝精度和電機精度,兩者之間有一一對應關係,且匹配必須合適。
工藝精度往往是如下表述:切割精度是多少?軌跡精度是多少?同步(bù)精度是多少?
電機精度(dù)分為靜態精度和動態精度(後續再詳講)。
盲(máng)目的追求更高精度(dù)是(shì)不智的,花錢無數,收(shōu)益卻很少,甚至適得其反。有時候精(jīng)度似乎提高的不多,實(shí)現起來成本卻(què)很高,有時候是不可承受(shòu)的成本,甚(shèn)至原有整個方(fāng)案都需要推倒(dǎo)重來。
以(yǐ)多色印刷為例,套印精(jīng)度±0.05mm,通過機械換算,可以算出0.05mm對應的電機精度——電機(jī)編(biān)碼器的精度,即電機旋轉一圈對應編碼器的線數。
關(guān)於(yú)速度和精度,兩(liǎng)者一定是矛盾(dùn)的,速度快了精度就差,速度慢了精度就高,因此需要兼顧考慮成本/性能(投入/產出),找到(dào)兩者的最佳平衡點。解決速度和精度之間的矛盾時,我們寧可犧牲速度,也要保證精度(dù),速度不夠導致的生產效率低下,可以(yǐ)采(cǎi)用多購置(zhì)設備來解決。
選型(xíng)除了理論分析和計算,更為重要的是必須積累大(dà)量的現(xiàn)場實際數據,融合貫通永(yǒng)遠不能(néng)離(lí)開實際應用。活生生的現場比抽象的數據令人印象深刻,一(yī)次街頭(tóu)打架比武館練拳三年更能行走江湖!


 發布日期:2022-05-18 02:46:11
發布日期:2022-05-18 02:46:11 訪問量:1627
訪問量:1627